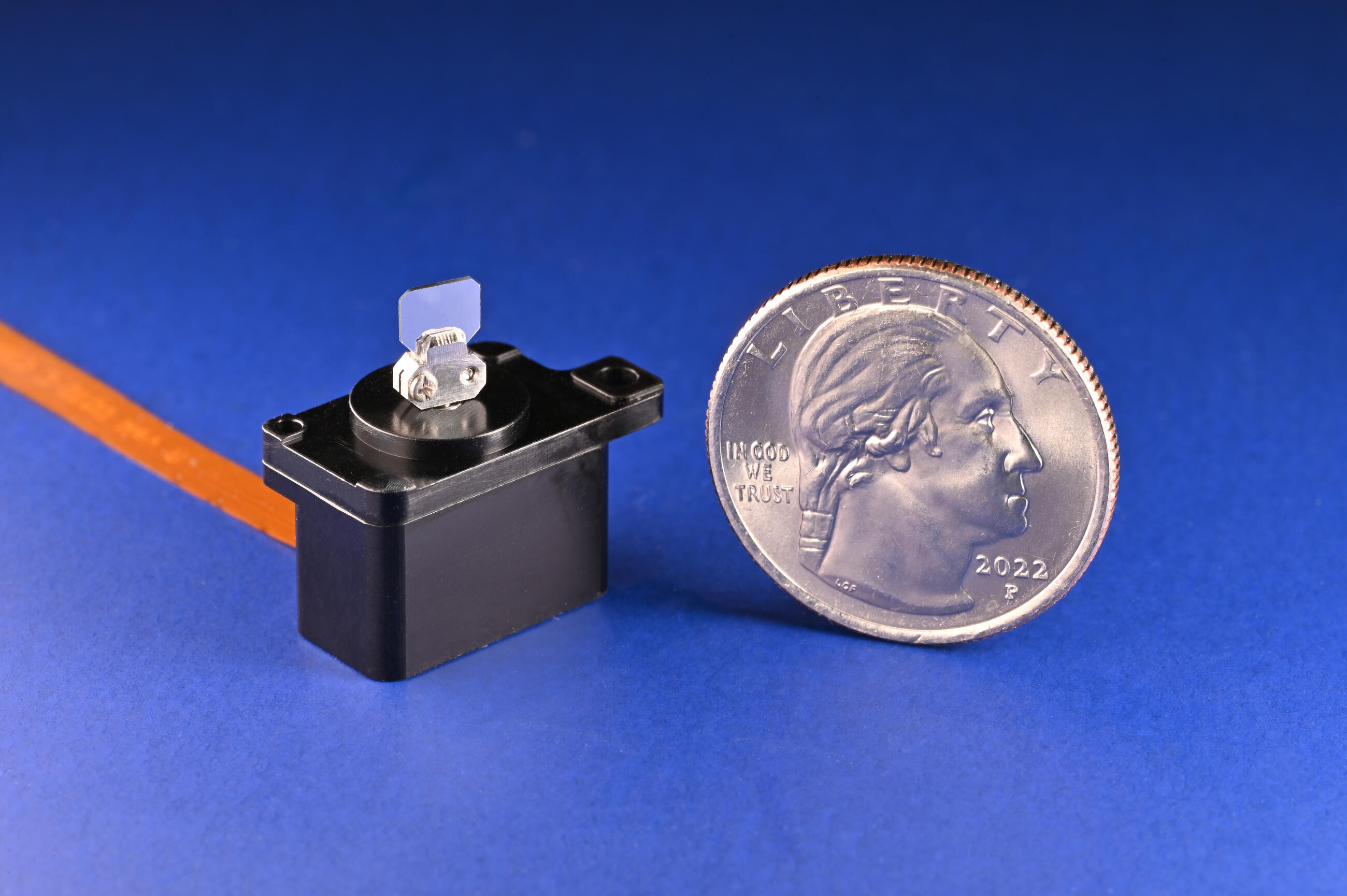
New Scale Technologies - M3-RS-U2-4.5-360 rotary smart stage and developer's kit
- Smallest rotary stage: 11.75 x 21.9 x 16 mm
- Embedded closed-loop controller
- No separate electronics needed
- 3.3 VDC input
- Accepts direct motion commands (I2C, SPI, or UART)
- Continuous 360° rotary motion
- Angular resolution ~21.9727 mdeg closed loop
- Built-in absolute position sensor
- Millisecond step and settle times
- 0.5 deg in 16 ms closed loop
- 0.5 deg in 1.2 ms open loop
- Holds position with zero power and no jitter
Smallest size, high resolution
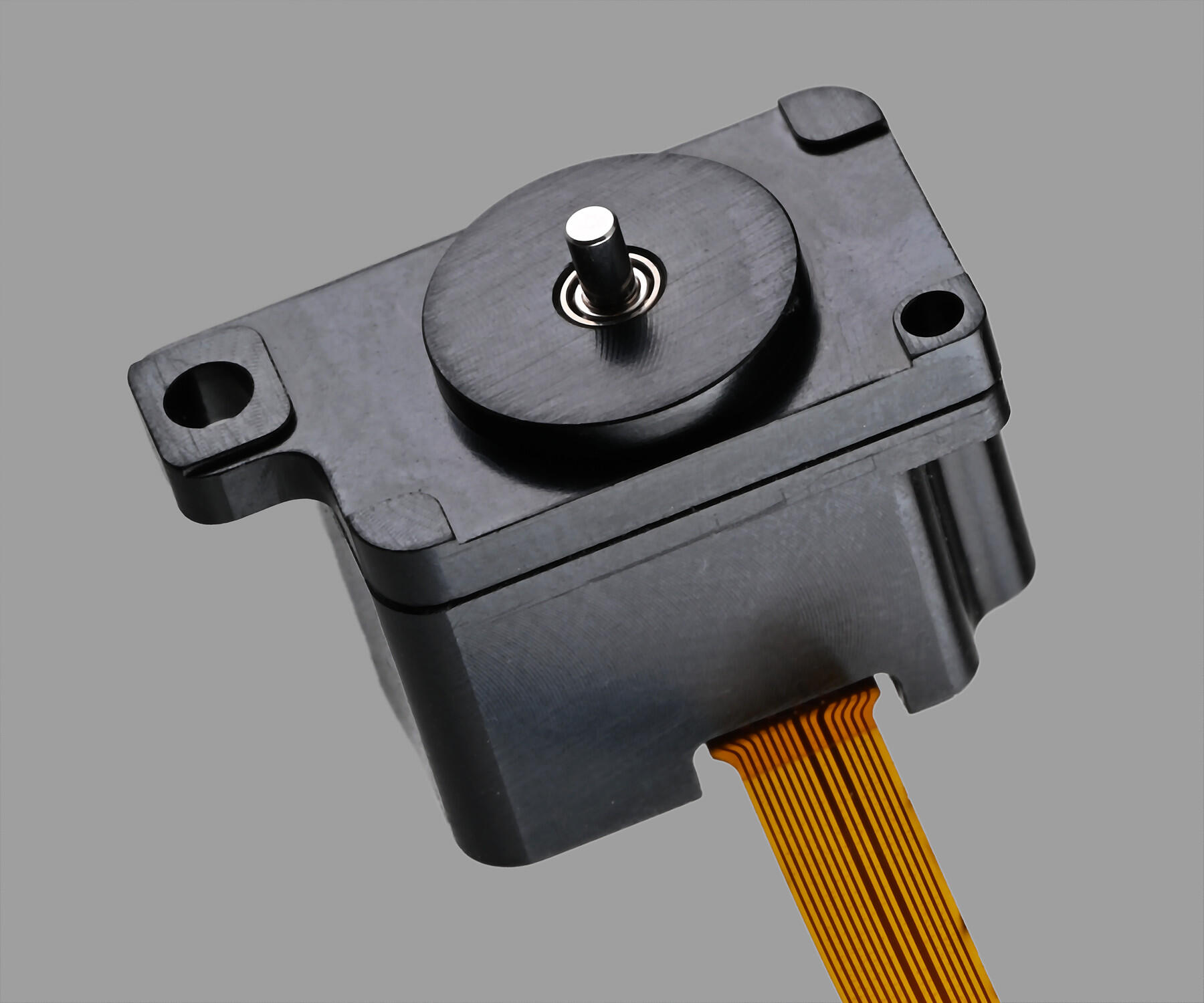
The M3-RS-U2-4.5-360 Rotary Smart Stage is a miniature, “all-in-one” rotary positioning stage with closed-loop position resolution better than 0.022 degrees. It provides continuous 360° rotation with absolute position feedback.
The compact housing measures only 11.75 mm long x 21.9 mm wide x 16 mm tall and incorporates a built-in controller with all drive electronics and embedded firmware, along with patented piezoelectric motors, position sensors and bearings.
With no need for an external controller, this smart stage enables smallest system size in hand-held and portable instruments.
Embedded controller for fastest integration
The embedded controller also means rapid and easy integration into your system. It accepts direct input of high-level digital motion commands from your system processor over I2C, SPI, or UART interface.
Developer’s kits include a USB adapter for PC control, and New Scale Pathway™ software for evaluation and system development.
Low power use for battery-powered systems
The positioning module needs only 3.3 V DC and uses approximately 750 mW when moving. It can be powered by USB or standard batteries. The integrated piezo motor holds position without using power.
Refer to "Datasheets & Downloads" tab for more specifications.
Applications
Scientific and industrial instruments requiring precise rotational positioning in a limited space.
- Point-to-point beam steering
- Optical tuning (with gratings or filters)
- Sample alignment
- Hand-held and battery-powered devices
|
Attribute |
Value |
|---|---|
|
Range of Motion |
360 degree continuous rotation |
|
Speed |
>1100 deg/sec |
|
Acceleration |
>1,000,000 deg/sec² |
|
Stall Torque (min) |
0.04 N-mm |
|
Holding Torque (min) |
0.08 N-mm (zero power) |
|
Recommended maximum payload mounted to rotating shaft (payload must be balanced) |
|
|
Mass |
3 g |
|
Inertia |
350 g-mm² |
|
CLOSED-LOOP performance (with built in sensor) |
|
|
Recommended step frequency |
up to 100 Hz |
|
Resolution (absolute encoder resolution) |
0.022 deg absolute |
|
Repeatability |
+/- 0.05 deg (880 µrad) |
|
Accuracy |
0.25 deg (4400 µrad) |
|
Closed loop step & settle (typical)* |
0.5 deg step: 16 ms 5 deg step: 22 ms 20 deg step: 31 ms |
|
OPEN-LOOP performance (external position sensor provided by user - see application note) |
|
|
Open loop step & settle times (typical)* |
0.05 deg step: 0.5 ms 0.5 deg step: 1.2 ms 5 deg step: 5 ms 20 deg step: 11.2 ms |
|
Input Voltage |
3.3 VDC +/-6% |
|
Power Consumption (typical) |
750 mW active, moving 190 mW active, ready 150 mW standby |
|
Stage Mass |
4.7 g |
|
Operational Lifetime |
>2 million random positions or seven years, whichever occurs first |
|
Temperature and Relative Humidity |
0 to +60 °C, non-condensing |
|
Conformance |
RoHS; CE pending |
|
Controller |
Integrated into stage, 64 MIPS no external controller needed |
|
Communication Interface |
I²C, SPI, or UART Input directly to M3-RS |
*With 0.6 g-mm2 inertial load mounted to output shaft, based on a target tolerance of 2 encoder counts
More Product Information

OptoVue
- Revolutionary technology advancement for wafer and die-level photonics probing
- Real-time in-situ calibrations
- Singulated die testing
- True die-level edge coupling
- In-situ power measurements
- Advanced calibration technologies
- Enables autonomous measurements
Horizontal Die-Level Edge Coupling
- Highest accuracy in test results
- Lowest coupling loss
- Repeatable measurement results due to exclusive automated fiber-to-facet alignment technology
- Reduced risk of damaging fibers with collision avoidance technology
- Ease of use for less experienced users
- Enables close simulation of real-world conditions with device performance closest to the final application
See "Specifications & Details" tab for more key features

- Compact design only 16x40mm cross section
- Play-free guidance up to 3Nm rolling moment
- Self-locking
- Low clamping dimension (from 24mm)
- Interchangeable positioning tables
- Scale display in millimeters
- Suitable for industrial and laboratory use
- 150mm stroke
- Feed 1.5mm per revolution
- After fixation, the slide is non-shifting up to 2000N
- Can be combined to any multi-axis arrangement
- Compatible with autoVimation clamps and profiles
- Adaptable to all profile sizes
- Magnetic tape and digital display optional

Junkosha’s new mmWave VNA Test Cable Assembly exhibits excellent phase (within +/- 4.5˚ at 50 GHz), and amplitude (within +/- 0.08 dB at 50 GHz) stability in flexure alongside strong phase stability in temperature through its 50 GHz bandwidth, available with NMD connector.
The assembly also displays impressive performance durability, surpassing 40,000 tick tock cycles during testing. The cable is bent 180˚ on a 2.25” radius mandrel with ease, demonstrating superior flexibility and no spring back. A ruggedized port side NMD connector is also available to ensure reliable connections to the VNA.

Resistance decade box designed for RTD and other resistance-based sensors' simulation. 0.01°C accuracy and 0.001°C resolution.
- Real resistors switched by relays
- Custom temperature scales
- No residual resistance
- 0.01°C accuracy
- Six different languages

-
Type APS-H CMOS sensor
-
IEEE 1588 PTP
-
Power over Ethernet
-
4.59 fps at full resolution
-
Extended near-infrared (GT5120NIR) model
-
GigE Vision interface with Power over Ethernet
-
Screw mount RJ45 Ethernet connector for secure operation in industrial environments
-
Supports cable lengths up to 100 meters (CAT-6 recommended)
-
Trigger over Ethernet Action Commands allow for a single cable solution to reduce system costs
-
Comprehensive I/O functionality for simplified system integration
-
Planarity adjusted (PA) EF Lens Mount (option -18) for electronic control of aperture and autofocus
-
Easy camera mounting via standard M3 threads at all sides and 1/4-20 tripod mounting hole
-
Easy software integration with Allied Vision's Vimba Suite and compatibility to the most popular third party image-processing libraries.
-
Enhanced Defect Pixel Correction feature with a new Defective Pixel List Manager tool that allows you to load different user defined defective pixel lists to match your application and optimize the life cycle of the camera

Threaded housing sensors allow precise positioning and easy installation using lock nuts. Suitable for both Reed and Hall effect technologies, they are ideal for applications requiring adjustable sensing gaps.

- Accommodates a combination of up to four Cascade Microtech probes
- Configurable for mixed-signal RF/mmW testing
- Quick and easy repairs to be performed in the field, by simply replacing individual probes
- Adaptable to new device layouts by exchanging individual probes

Food and beverage technology is changing the global food and beverage industry from production to delivery. Consumer and market demand for sustainable and healthy products also means stricter regulations that promote safe consumption, sustainable package production, and effective recycling or disposal. These trends add up to a heightened demand for organizations in the industry to commit to testing protocols that ensure food safety, quality, and compliance with evolving standards. Facilities and manufacturers face challenges such as implementing advanced traceability systems, ensuring the safety and efficacy of new ingredients and packaging materials, and adhering to rigorous environmental regulations. Additionally, the rise of automation and digitalization in food production results in new challenges related to interoperability and cybersecurity. Testing facilities must adapt swiftly to support R&D efforts, ensuring the safe, efficient, and compliant production of innovative food and beverage products in a rapidly changing market landscape.

- Solve applications rather than develop underlying tools by leveraging a toolkit with a more than 25-year history of reliable performance
- Tackle applications with utmost confidence using field-proven tools for analyzing, classifying, locating, measuring, reading and verifying
- Base analysis on monochrome and color 2D images as well as 3D profiles, depth maps and point clouds
- Harness the full power of today's hardware through optimizations exploiting SIMD, multi-core CPU and multi-CPU technologies
- Support platforms ranging from smart cameras to HPCs via a single consistent and intuitive API
- Obtain live data in different ways with support for analog, Camera Link, CoaXPress, DisplayPort, GenTL, GigE Vision, HDMI, SDI, Linux and USB3 Vision Interfaces
- Maintain flexibility and choice by way of support for 64-bit Windows and Linux along with Intel and Arm processor architectures
- Leverage available programming know-how with support for C, C++, C+ and CPython languages
- Experiment, prototype and generate program code using Aurora Imaging Library CoPilot interactive environment
New Scale Technologies (NST)
Website
Embedded Motion Modules Make Great Products Smaller
Founded in 2002, NST develops, licenses and manufactures standard and customized embedded motion modules that fit on your fingertips. These include rotary and linear smart stages that incorporate our patented and proprietary technologies: SQUIGGLE® and UTAF piezoelectric ultrasonic motors, position sensors, precision bearings, drive and control circuits, and microprocessors with closed-loop firmware that connect to New Scale Pathway® PC software.